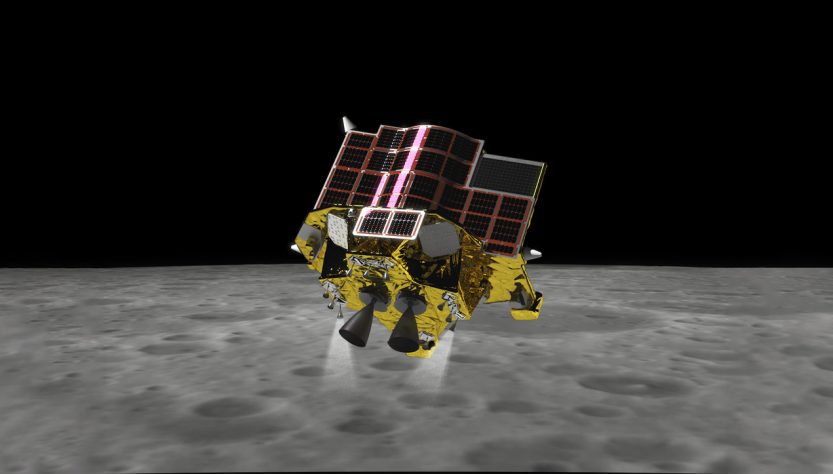
일본의 달 착륙선 ‘SLIM(Smart Lander for Investigating Moon)’이 지난 20일 달 표면에 착륙했습니다. 일본은 미국, 소련, 중국, 인도에 이어 다섯 번째로 달 표면 소프트 랜딩(연착륙)에 성공한 나라가 되었습니다.
하지만 태양전지판이 전력을 생산하지 못하면서 임무에 큰 차질이 생길 것으로 보입니다. 일본 항공우주탐사국(JAXA)에 따르면, 현재 SLIM은 전력을 생산하지 못하고 있으며 기존 전력으로 착륙 데이터를 전송받고 원인을 분석 중이라고 발표했습니다.
SLIM은 달 표면에 안정적으로 안착했지만 태양 전지판이 태양을 등진 서쪽을 향하게 되었습니다. 다음 주 중 태양이 서쪽을 향할 때 전력을 생산할 가능성이 있지만 이달 말 SLIM이 착륙한 시오리 분화구는 긴 밤에 들어가게 되고, 충전하지 못하면 단 몇 시간 동안만 가동할 수 있습니다.
SLIM은 그 이름(Smart Lander)처럼 ‘착륙’ 그 자체를 실험하는 탐사선으로, 목표 착륙 지점을 분화구 주변 15도 기울어진 지형으로 선택했습니다. 탐사선에 탑재된 컴퓨터로 지형을 파악하고 작은 분화구 등 위험한 곳을 피해 ‘스마트’하게 착륙합니다. 10km 내외의 기존 착륙 범위를 한참 좁힌 오차 100m를 목표로 하여 ‘달 저격수’라는 별명을 붙이기도 했습니다. 일본 항공우주탐사국(JAXA)은 이 기술이 ‘착륙하기 쉬운 곳’을 찾는 것에서 ‘우리가 원하는 곳’에 착륙할 수 있는 방향으로 변화를 불러올 것이라 이야기했습니다.

한 편, 착륙 직전 SLIM은 달 연구를 도울 탐사 로봇 두 대를 성공적으로 사출시켰습니다. LEV-1, LEV-2라고 불리는 두 대의 탐사 로봇은 앞으로 2주간 달 표면에서 임무를 수행합니다. 카메라와 안테나를 통해 SLIM의 착륙 영상 등 다양한 장면을 담을 예정입니다.
작성 : 별바다신문 이봄 교육연구원
spring@astrocamp.net